2.5 Level4无人驾驶的新技术体系—多传感器融合和DNN算法
Google开始做无人车是在2009年,基于斯坦福参加DARPA比赛时候的原型车。由于2009年摄像头的算法效果并不好,导致Google在今后的开发上,非常依赖LiDAR。不断对LiDAR算法遇到的cornercase(例外)进行算法层面的补充,也就是打补丁。而且,为了提高安全性,Google甚至自己制造了世界上唯一的128线LiDAR。也就是说,Google的技术体系中,高线数LiDAR是必不可缺的主传感器。
而近年来,主要有以下三个新的动向。
A.多颗低线数LiDAR对高线数LiDAR的模拟和替换
由于高线数LiDAR的生产工艺要求极高,Velodyne和谷歌的产量有限,而且成本非常高,导致使用LiDAR的技术方案普及遇到很大的苦难。近年来,有很多初创公司发现通过组合好多颗16线的LiDAR,也能达到不逊于单颗高线数LiDAR的效果。
B.多传感器,尤其是LiDAR和摄像头的算法融合
由于近年计算机视觉和深度学习算法的发展,摄像头的图像识别能力相比2010年前后有了质的飞跃。在传统使用LiDAR为主传感器的Level4无人驾驶,和采用更便宜的摄像头为主传感器的Level2ADAS方案的基础上,有了将LiDAR和摄像头数据进行融合的新尝试。通过LiDAR和摄像头这两种传感器的优势互补,可以用更加低性能的传感器,实现更高的安全性。
C.对于LiDAR点云数据,采用DNN算法
Google的时代,DNN还没有得到广泛的应用。所以Google对于点云的识别,采取的还是类似于ComputerVision的算法—提取特征。但是由于最近DNN的效果逐渐得到证明,也有一些新的尝试,用DNN来做点云数据的学习,并且识别物体。这个效果虽然还有待验证,但是我们相信最终这个方法在数据量大了以后会超越传统的特征识别算法。
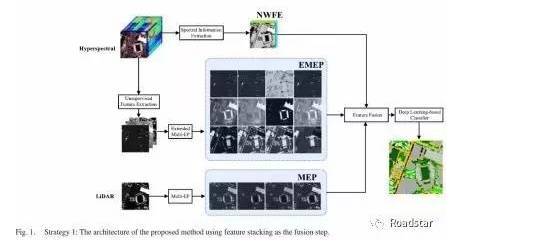
(图:DNN在LiDAR数据中的应用例)
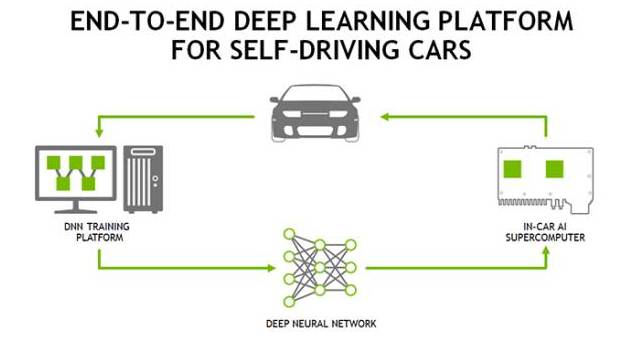
(图:Nvidia的DNN方案)
2.6无人驾驶是泡沫吗?
对于无人驾驶普及而言,最关键的因素是性能和价格。
从价格的角度,业内普遍认为最贵的激光雷达,会在今后五年内价格降低到不碍事的程度。
现在问题的关键因素在于,无人驾驶是否能符合大家的预期,在可预见的短期内达到技术的成熟。
近年,谷歌的技术已经达到了8,000公里一次人工干预的水平。这个水平对于很多人而言,已经非常接近于实现了Level4。而Tesla,更是激进的认为仅靠摄像头和超声波雷达,毫米波雷达的方案,就已经能够实现两倍于人的驾驶能力。让我们保守一点,假设连续100,000公里一次人工干预是Level4无人驾驶的基础要求。
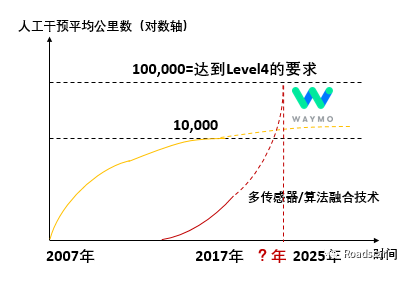
(图:技术的发展预测图,黄线是Google的方案,红线代表新的技术体系)
根据刚才所述,采用新的技术架构下,我们认为Level4无人驾驶技术,有希望在2025年之前的某个时间,达到足够好的安全性。而无人驾驶是否破灭,则要取决于图中虚线所代表的未来的技术进展。
另外,根据Gartner著名的HypeCycle来看,无人驾驶已经处于泡沫期的最后阶段。而他们的预测中,无人驾驶的普及需要远大于10年的时间。Gartner对于无人驾驶技术还是抱着相对保守的态度。
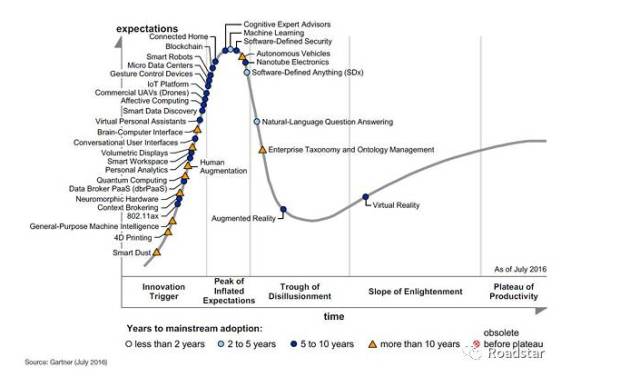
(图:Gartner著名的HypeCycle图)
最终无人驾驶是否会是一个泡沫,有待于接下来三年内技术的进步来揭开这个谜题。我们团队对无人驾驶技术的未来,充满信心。
 如发现本站文章存在版权问题,烦请联系editor@askci.com我们将及时沟通与处理。
如发现本站文章存在版权问题,烦请联系editor@askci.com我们将及时沟通与处理。


 中商产业研究院:《2020年中国加氢站行业市场前景及投资研究报告》发布
中商产业研究院:《2020年中国加氢站行业市场前景及投资研究报告》发布
 锤子科技CEO罗永浩跨界电商直播 一文看懂我国电商直播发展如何?
锤子科技CEO罗永浩跨界电商直播 一文看懂我国电商直播发展如何?
 中商产业研究院:《2020年中国MCN行业市场前景及投资研究报告》发布
中商产业研究院:《2020年中国MCN行业市场前景及投资研究报告》发布
 2020年1-2月全国汽油产量为2044万吨 同比下降13.9%
2020年1-2月全国发电量同比下降8.2%
2020年1-2月全国集成电路产量为296.3亿块 同比增长8.5%
2020年受疫情影响较大的行业分析系列之三——旅游行业篇(图)
2020年1-2月全国光缆产量统计数据分析
2020年1-2月全国发动机产量同比下降38.8%(图)
2020年1-2月全国十种有色金属产量为935.4万吨 同比增长2.2%
2020年1-2月全国汽油产量为2044万吨 同比下降13.9%
2020年1-2月全国发电量同比下降8.2%
2020年1-2月全国集成电路产量为296.3亿块 同比增长8.5%
2020年受疫情影响较大的行业分析系列之三——旅游行业篇(图)
2020年1-2月全国光缆产量统计数据分析
2020年1-2月全国发动机产量同比下降38.8%(图)
2020年1-2月全国十种有色金属产量为935.4万吨 同比增长2.2%